Instrumentation Cables Questions & Answers
Instrumentation Cables Questions & Answers

Cables Questions and Answers
Explain different Control and Instrumentation Cables ?
Instrumentation cables are multiple conductor cables that convey low energy electrical signals used for monitoring or controlling electrical power systems and their associated processes.
The functions of measurement and control are vital in manufacturing and processing applications. These functions are greatly dependent on their electronic circuitry.
Typical applications include industrial equipment control, broadcasting, assemble equipment, or mass transit systems.
Different types of Instrumentation Cables are as follows :
ARCNET cables are used in high-speed, token-based, ARCNET networks that provide local area network (LAN) communications between industrial computers.
AS-I cables are used to interface binary actuators, sensors, and other AS-i devices. These two-core cables supply power and transfer data.
CANbus cables are used in high-speed, serial data networks that are designed for harsh electrical environments. They are used widely in the automotive industry.
CANopen cables are used with an industrial communications fieldbus protocol that is based on CANbus.
DeviceNet cables also use the controller area network (CAN) protocol, but typically connect devices such as limit switches, photoelectric cells, valve manifolds, motor starters, drives, and operator displays to programmable logic controllers (PLCs) and personal computers.
Fieldbus cables are used to connect industrial devices such as actuators, sensors, transducers, and controllers. In the hierarchy of plant networks, the fieldbus environment is the base level group.
Foundation Fieldbus cables are used in an all-digital, serial, two-way communications system that serves as a LAN for plant instrumentation and factory control devices.
HART cables allow communications without interrupting a 4-20mA signal. They allow a host application (master) to get two or more digital updates per second from a field device.
PROFIBUS cables use a vendor-independent fieldbus standard that is suitable for both process automation and manufacturing applications.
P-Net cables conform to a European standard (EN 50 170 Vol. 1) that is now part of the International Fieldbus Standard (IEC 61558 Type 4).
What is Cable Shielding ?
Control and instrumentation cables may feature a type of electromagnetic shielding material, which is wrapped around the cable underneath the outer jacket.

Shielding serves to prevent electrical noise from affecting the transmitted signal, and to reduce electromagnetic radiation emission from the cable itself.
Shielding is typically comprised of metal braiding, metal tape or foil braiding. A shielded cable assembly may also feature a special grounding wire known as a drain wire.
How do we determine the rating of a cable?
The continuous current rating of a cable is determined by the ability of the cable to dissipate the heat generated by the current passing through its conductor.
It depends on a number of parameters, but the most important are the:
- Conductors’ DC resistance;
- Thermal resistance of the insulating sheathing materials; and
- Ambient conditions of the environment where the cable is installed (for example the surrounding air temperature).
Differences between solid and stranded conductors?
Solid conductors are constructed of one, single piece of metal. It is tougher than a stranded conductor, but rigid and less flexible than a stranded conductor.
Solid conductors are more likely to break if subjected to frequent flexing than stranded conductors.
Stranded conductors are made of multiple small strands, which group together to make up a single conductor. It is more flexible than a solid conductor, but less durable.
Stranded Constructions:
Bunch Stranding , Concentric Stranding, Unilay Stranding, Rope Lay Stranding
- Bunch stranding is a collection of strands twisted together in the same direction without regard to the geometric arrangement.
- Concentric stranding consists of a central wire or core surrounded by one or more layers of helically laid wires. Each layer after the first has six more wires than the preceding layer. Except in compact stranding, each layer is usually applied in a direction opposite to that of the layer under it.
- Unilay stranding is the same as true concentric; except that the lay length is the same in each layer. Normal direction of lay is left-hand.
- Rope lay stranding is a concentrically stranded conductor, each of whose component strands are they themselves stranded. A rope stranded conductor is described by giving the number of groups laid together to form the rope along with the number of wires in each group.
Differences between Cable Jackets & Insulations ?
A jacket is an outer sheath that protects the wire or cable core from mechanical, moisture and chemical issues.
Jackets help with flame resistance, protect against sunlight and facilitate installation. Jackets come in a variety of types and styles and are mainly plastic or rubber based.

Insulation is a coating that is extruded or taped onto bare wire to separate conductors from each other electrically and physically. There are a variety of insulation types for different applications.
Types of Jackets & Insulations ?
Thermoplastic
Thermoplastics are the primary insulation and jacket used in wire and cable. A Thermoplastic is a material that softens when heated and becomes firm when cooled. Thermoplastics come in a variety of different types each with its own set of characteristics.
Types: PVC, Fluoropolymers, Polyolefins, TPE
Thermoset
Thermoset plastics are a group of compounds that are hardened or set by the application called cross-linking. Cross-linking is accomplished by a chemical process, vulcanization (heat & pressure) or irradiation.
Types: CPE, XLPE, EPR, Silicone Rubber
Fiber
Fiber jackets are commonly used in high temperature applications due to their excellent heat resistance. Fiber jackets are also flame resistant and can be used as overbraids for silcone rubber insulation.
What is the purpose of the screens in instrumentation cables?
The presence of large machines, welders and other processes in industrial environments create a lot of electrical interference (noise).
This noise has the potential to distort the clarity of signals that are transmitted between equipment, which may lead to false readings.
For example, a system monitoring the temperature of a boiler may not report the correct temperature. A metallic screen will shield the cores of a cable from interference, thus improving the clarity of a signal.
If a cable has a fire rating, does this mean that it won’t burn?
Fire rated cables are designed to continue functioning during the course of a fire for a specific period of time which allows for safe evacuation of a building by maintaining smoke handling systems, emergency lighting etc. The cable will burn however in a manner that ensures circuit integrity during the fire.
Can a cable with a fire rating operate continuously in hot environments, for example, very close to a furnace?
No, a cable with a fire rating does not necessarily mean that is it suitable for use in a hot environment.
It is necessary to design cables using special materials such as silicone or glass fibre to withstand relatively high temperatures (in excess of 110°C on a continuous basis.)
What standards / guidelines are available for cable tray systems?
1. The National Electrical Code publishes the standards for all types of electrical applications. Articles 318, 250, and 800 cover various aspects of cable tray systems.
2. NEMA, (National Electrical Manufacturers Association), is an association comprised of the major cable tray manufacturers in the industry. This committee has published three documents to date: NEMA VE1, FG1 and VE2.
NEMA VE1 covers general cable tray definitions, manufacturing standards, performance standards, test standards, and application information.
NEMA FG1 addresses the standards for fiberglass cable tray systems.
NEMA VE2 is a cable tray installation guideline which covers receiving and unloading material, storage of material, and general installation practices.
What is the difference between the Power & Control Cables?
Power Cables – No. of Cores 2,3, 3 1/2 & 4 Core
Control Cables – Upto 63 Cores or above Standards Applicable for both – IS-694 & IS-1554 .
What is the difference between Unsheathed & Sheathed Single Core Cable as per IS-694?
Unsheathed – Only Core Insulation will be done and there will be no Sheathing.
Sheathed – Sheathing will be done on Core Insulation.
What is the difference between Control & Instrumentation Cable?
Control Cables – They are generally Core Constructed.
Instrumentation Cables – They are generally Pair Constructed with Shielding.
What is the difference between Thermocouple & Instrumentation Cable?
Conductor Material is different for both.
What is the difference between Armoured & Unarmoured Cable?
What is a Co-Axial Cable?
This type of cable is used for Very High Frequency (V.H.F.) Applications.
What is the Voltage Grade?
Low Voltage Grade — upto and including 1.1 KV
High Voltage Grade — above 1.1 KV
Number of Strands for Cables ?
Dia of Strands for 1.5 Sq.mm can be:
a. Incase of 7 Strands – 7/0.52
b. Incase of 0.3 mm dia each – 21 Strands
c. Incase of 0.2 mm dia each – 48 Strands.
What is the Core / Pair Identification incase of LDPE Insulated Cable?
By Colour or By Number printed Al-Mylar Tape / Polyster Tape.
What is the Purpose of Screening?
To reduce the interference by nearby sources.
What are the different types of Screenings?
a. Al-Mylar / Cu-Mylar Tape
b. ATC or ABC Braiding.
What will be the Normal Insulation Thickness for Telephone Cables?
a. Core Insulation – 0.2, 0.3 mm
b. Sheath – 0.5 to 1.2 mm.
What is the difference between RTD / Instrumentation Cable?
RTD Cables will be Triad Constructed.
Instrumentation Cables are Pair constructed.
What are the normal sizes of Control Cables?
1.5 & 2.5 Sq.mm
What will be the normal Conductor sizes for instrumentation / RTD Cables?
0.5, 0.75, 1.0, 1.5 & 2.5 Sq.mm
Thermocouple Cable Conductor normal sizes ?
a. Single pair – 16 AWG (1.295 mm dia)
b. Multi pair – 20 AWG (0.813 mm dia)
What is the Temperature Tolerance (+/- deg. C) allowable for Thermocouple cables?
a. IS 8784 +/- 3 Deg. C
b. ANSI MC 96.1 +/- 2.2 Deg. C
Colour code as per IS 1554 for Core constructed Cables ?
a. Upto 5 Cores by different colours i.e for 2 Cores Red & Black, for 3 Cores Red, Yellow & Blue, for 4 cores Red, Yellow, Blue & Black, for 5 Cores Red, Yellow, Blue, Black & Grey.
b. Above 5 Cores : One Core Yellow and One Core Blue remaining Grey in each layer (or) any single colour with numbers printed.
For above 5 Cores Grey with number printing is our normal practice.
What are the 3 types of Braided (Metal Braiding) Cables manufactured?
a. Annealed Tinned Copper Braided Cables
b. Annealed Bare Copper Braided Cables
c. Nickle Plated Copper Braided cables
d. G.I. Braided Cables.
What is the Temperature with standability of PTFE & Fibre Glass?
PTFE – 250 Deg.C, FG Cables 400 Deg.C



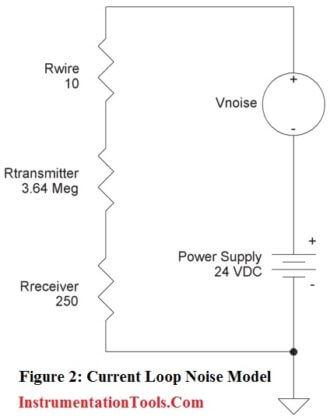 0.0014 volts. This is because the noise voltage measured across any resistor is equal to the Ohms of that resistor divided by the total Ohms in the circuit multiplied by the noise voltage.
0.0014 volts. This is because the noise voltage measured across any resistor is equal to the Ohms of that resistor divided by the total Ohms in the circuit multiplied by the noise voltage.












